
یک وسیله نقلیه مدرن می تواند بیش از 70 کامپیوتر را در خود داشته باشد. اینگونه است که این سیستم ها با یکدیگر صحبت می کنند.
شما سوار ماشینتان شدید، دکمه استارت را فشار دادید و موتور در کمترین زمان زنده شد، اما ماشین شما چگونه تصمیم گرفت که روشن شود یا نه؟
خوب، برای روشن کردن ماشین، چندین آنتن و واحد کنترل الکترونیکی با جاکلیدی ارتباط برقرار کردند. پروتکل شبکه کنترل کننده (CAN) تضمین می کند که ارتباط بین جا کلیدی، آنتن ها و ECU ها به درستی در داخل ماشین شما انجام می شود.
بنابراین پروتکل CAN چیست و چگونه به دستگاههای موجود در سیستم خودروی شما کمک میکند تا با هم کار کنند؟ خب بیایید بفهمیم
پروتکل CAN چیست و چرا لازم است؟
در آن زمان، خودروها وسایل الکترونیکی زیادی نداشتند. در واقع، اگر می خواستید وسیله نقلیه خود را در اوایل دهه 1900 راه اندازی کنید، باید از وسیله نقلیه خود خارج می شد و موتور را با دست میلنگ می زد.
برعکس، خودروهای امروزی چندین حسگر الکترونیکی دارند و دستگاههای الکترونیکی همه چیز را از دمای کابین گرفته تا چرخشهای میل لنگ نظارت میکنند.
گفته می شود، داده های دریافت شده از این حسگرها تا زمانی که پردازش نشوند، ارزشی ندارند. این پردازش داده ها توسط دستگاه های محاسباتی معروف به واحدهای کنترل الکترونیکی (ECU) انجام می شود.
برخلاف یک کامپیوتر با یک CPU، یک خودرو دارای چندین ECU است که هر یک وظیفه انجام وظیفه خاصی را بر عهده دارند. اگرچه این ECU ها می توانند یک کار واحد را به طور موثر انجام دهند، اما باید با هم کار کنند تا از عملکرد صحیح ویژگی هایی مانند ABS و ESC اطمینان حاصل کنند.
به همین دلیل، تمام ECU های یک خودرو باید متصل شوند. می توان از توپولوژی نقطه به نقطه برای ایجاد این اتصالات استفاده کرد که در آن هر ECU مستقیماً به هر ECU دیگری متصل می شود. با این حال، این معماری سیستم را پیچیده می کند. در واقع، یک وسیله نقلیه مدرن بیش از 70 ECU دارد و اتصال آنها به صورت یک به یک وزن سیم کشی را به طور تصاعدی افزایش می دهد.
برای حل این مشکل، بوش به همراه مرسدس بنز و اینتل در سال 1986 پروتکل Controller Area Network را ایجاد کردند. این پروتکل ECU ها را قادر می ساخت تا با استفاده از یک گذرگاه داده مشترک به نام CAN bus با یکدیگر ارتباط برقرار کنند.
CAN چگونه کار می کند؟
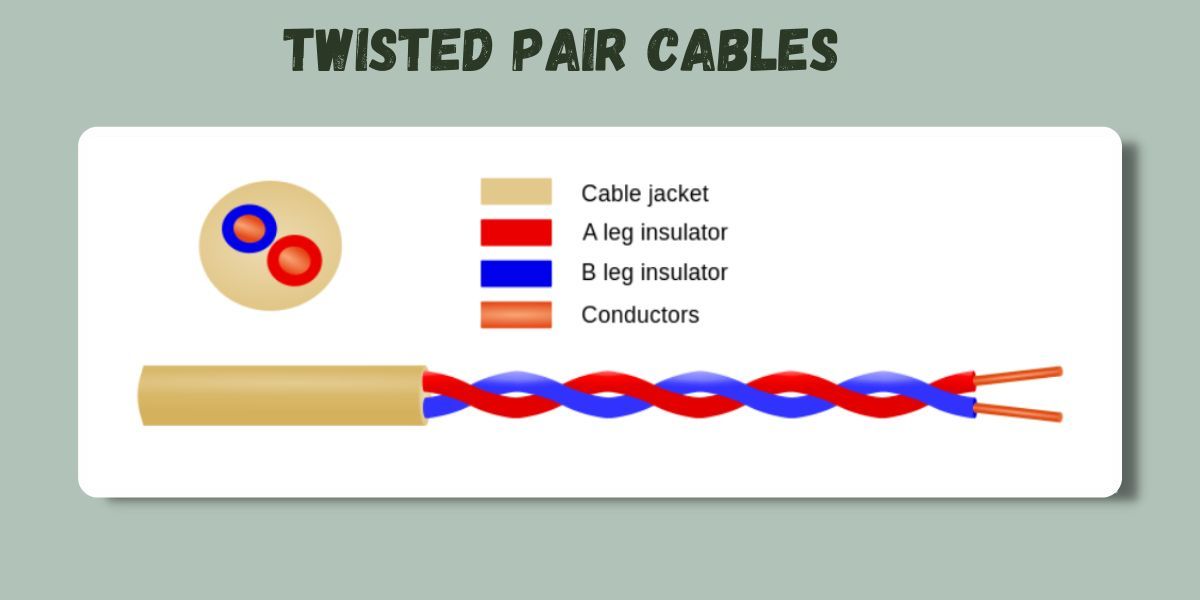
پروتکل CAN یک روش ارتباطی مبتنی بر پیام است که برای انتقال داده بر مجموعه ای از کابل های جفت پیچ خورده متکی است. این سیم ها با نام های CAN high و CAN low شناخته می شوند.
برای فعال کردن انتقال اطلاعات روی این سیمها، سطوح ولتاژ آنها تغییر میکند. این تغییرات در سطوح ولتاژ سپس به سطوح منطقی تبدیل می شوند که ECU های خودرو را قادر می سازد با یکدیگر ارتباط برقرار کنند.
برای انتقال منطق یک در گذرگاه CAN، ولتاژ هر دو خط روی 2.5 ولت تنظیم شده است. این حالت به عنوان حالت مغلوب نیز شناخته می شود، به این معنی که گذرگاه CAN برای استفاده توسط هر ECU در دسترس است.
برعکس، زمانی که خط بالای CAN در ولتاژ 3.5 ولت و خط پایین CAN در 1.5 ولت باشد، منطق 0 در گذرگاه CAN منتقل می شود. این حالت اتوبوس به عنوان حالت غالب نیز شناخته می شود که به هر ECU در سیستم می گوید که ECU دیگری در حال ارسال است، بنابراین آنها باید منتظر بمانند تا انتقال به پایان برسد قبل از اینکه پیام خود را ارسال کنند.
برای فعال کردن این تغییرات ولتاژ، ECU های خودرو از طریق یک گیرنده CAN و یک کنترلر CAN به باس CAN متصل می شوند. فرستنده و گیرنده وظیفه تبدیل سطوح ولتاژ در گذرگاه CAN را به سطوحی دارد که ECU قادر به درک آن باشد. از طرف دیگر، کنترل کننده برای مدیریت داده های دریافتی و اطمینان از برآورده شدن الزامات پروتکل استفاده می شود.
همه این ECU های متصل به گذرگاه CAN می توانند داده ها را روی کابل پیچ خورده انتقال دهند، اما یک مشکل وجود دارد، فقط پیامی با بالاترین اولویت را می توان در گذرگاه CAN منتقل کرد. برای درک اینکه چگونه یک ECU داده ها را روی گذرگاه CAN منتقل می کند، باید ساختار پیام پروتکل CAN را درک کنیم.
ساده کردن CAN از طریق یک مثال
اکنون که ما درک اولیه ای از ظاهر پیام در گذرگاه CAN داریم، می توانیم نحوه انتقال داده ها بین ECU های مختلف را درک کنیم.
برای سادگی، فرض کنید که ماشین ما دارای 3 ECU است: نود 1، نود 2، و نود 3. از 3 ECU، نود 1 و نود 2 می خواهند با نود 3 ارتباط برقرار کنند.
بیایید ببینیم که چگونه پروتکل CAN به اطمینان از ارتباط در چنین سناریویی کمک می کند.
- تشخیص وضعیت اتوبوس: تمام ECU های خودرو به اتوبوس CAN متصل هستند. در مورد مثال ما، Node 1 و Node 2 می خواهند داده ها را به ECU دیگری ارسال کنند. قبل از انجام این کار، هر دو ECU باید وضعیت گذرگاه CAN را بررسی کنند. اگر گذرگاه در حالت غالب باشد، ECU ها نمی توانند داده ها را به عنوان گذرگاه در حال استفاده انتقال دهند. از طرف دیگر، اگر اتوبوس در حالت مغلوب باشد، ECU ها می توانند داده ها را ارسال کنند.
- ارسال شروع فریم: اگر ولتاژ دیفرانسیل در گذرگاه CAN صفر باشد، هر دو گره 1 و نود 2 وضعیت گذرگاه را به حالت غالب تغییر می دهند. برای انجام این کار، ولتاژ CAN high به 3.5 ولت افزایش می یابد و ولتاژ CAN low به 1.5 ولت کاهش می یابد.
- تصمیم گیری اینکه کدام گره می تواند به گذرگاه دسترسی داشته باشد: پس از ارسال SOF، هر دو گره برای دسترسی به گذرگاه CAN رقابت می کنند. گذرگاه CAN از پروتکل Carrier Sense Multiple Access/Collision Detection (CSMA/CD) استفاده می کند تا تصمیم بگیرد به کدام گره دسترسی داشته باشد. این پروتکل شناسه های ارسال شده توسط هر دو گره را مقایسه می کند و به یکی با اولویت بالاتر دسترسی می دهد.
- ارسال داده: هنگامی که گره به گذرگاه دسترسی پیدا کرد، فیلد داده به همراه CRC به گیرنده ارسال می شود.
- بررسی و پایان دادن به ارتباط: با دریافت داده ها، نود 3 CRC داده های دریافتی را بررسی می کند. اگر خطایی وجود نداشته باشد، گره 3 یک پیام CAN را به گره فرستنده با یک بیت غالب در قاب تایید همراه با EOF ارسال می کند تا ارتباط را خاتمه دهد.
انواع مختلف CAN
اگرچه ساختار پیام مورد استفاده توسط پروتکل CAN ثابت می ماند، سرعت انتقال داده و اندازه بیت های داده برای انتقال پهنای باند بالاتر داده تغییر می کند.
با توجه به این تفاوت ها، پروتکل CAN دارای نسخه های متفاوتی است که در زیر نمای کلی از آن ارائه شده است:
- پرسرعت CAN: داده های روی سیم های CAN به صورت سریال ارسال می شود و این انتقال را می توان با سرعت های مختلف انجام داد. برای CAN با سرعت بالا، این سرعت 1 مگابیت در ثانیه است. با توجه به این سرعت انتقال داده بالا، قوطی پرسرعت برای ECU ها استفاده می شود که سیستم های انتقال قدرت و ایمنی را کنترل می کنند.
- کم سرعت CAN: در مورد CAN کم سرعت، سرعت انتقال داده به 125 کیلوبیت بر ثانیه کاهش می یابد. از آنجایی که سرعت پایین می تواند نرخ داده کمتری را ارائه دهد، از آن برای اتصال ECU هایی استفاده می شود که راحتی سرنشینان را مدیریت می کنند، مانند سیستم تهویه مطبوع یا سیستم اطلاعات سرگرمی.
- Can FD: مخفف نرخ داده انعطاف پذیر CAN، CAN FD جدیدترین نسخه پروتکل CAN است. اندازه قاب داده را به 64 بایت افزایش می دهد و به ECU ها اجازه می دهد تا داده ها را با سرعت های 1 مگابیت در ثانیه تا 8 مگابیت در ثانیه انتقال دهند. این سرعت انتقال داده را می توان توسط ECU ها در زمان واقعی بر اساس نیازهای سیستم مدیریت کرد و امکان انتقال داده ها با سرعت های بالاتر را فراهم می کند.
آینده ارتباطات خودرو چیست؟
پروتکل CAN به چندین ECU اجازه می دهد تا با یکدیگر ارتباط برقرار کنند. این ارتباط ویژگی های ایمنی مانند کنترل پایداری الکترونیکی و سیستم های پیشرفته کمک راننده مانند تشخیص نقاط کور و کروز کنترل تطبیقی را امکان پذیر می کند.
گفته می شود، با ظهور ویژگی های پیشرفته مانند رانندگی خودکار، مقدار داده هایی که توسط گذرگاه CAN منتقل می شود به طور تصاعدی در حال افزایش است. برای فعال کردن این ویژگیها، نسخههای جدیدتر پروتکل CAN، مانند CAN FD، وارد بازار میشوند.