
سرعت فن را با برد میکروکنترلر Raspberry Pi Pico و یک موتور کنترل کنید.
برد میکروکنترلر Raspberry Pi Pico انعطاف پذیری زیادی را برای علاقه مندان به کاوش در پروژه های الکترونیکی برای افزایش دانش فنی خود ارائه می دهد. اینها ممکن است از مانیتورینگ خانه DIY تا ایستگاه های ساده نظارت آب و هوا متغیر باشند. یادگیری اصول اولیه یک پایگاه دانش قوی برای شما فراهم می کند تا بتوانید با اطمینان به سمت کارهای پیچیده تر کار کنید.
بیایید بررسی کنیم که چگونه می توانید از ترانزیستور و موتور برای تولید نیروی باد با استفاده از Raspberry Pi Pico استفاده کنید.
برای شروع چه چیزی لازم است؟
موارد زیر با کیت مخترع کیترونیک برای رزبری پای پیکو موجود است. اگرچه آنها اجزای نسبتاً رایجی هستند، بنابراین به راحتی می توان آنها را جداگانه تهیه کرد.
- پره ی پنکه
- موتور
- کانکتور ترمینال برد برد
- تخته نان
- مقاومت 2.2kΩ (باندها قرمز، قرمز، قرمز، طلایی خواهند بود)
- سیم بلوز نر-نر 5 برابر
- ترانزیستور – برای تامین جریان بیشتر به موتور نسبت به پین های GPIO Pico نیاز است
نگاهی به نمای کلی ما از Kitronik Inventor’s Ki for Raspberry Pi Pico بیندازید تا دانش فنی خود را برای آزمایش های آینده گسترش دهید. برای این پروژه به یک Pico با هدرهای پین GPIO نیاز دارید. نحوه لحیم کردن پینهای هدر روی Raspberry Pi Pico را بررسی کنید.
این شامل نکاتی در مورد بهترین روشهای لحیم کاری است، بنابراین میتوانید اطمینان حاصل کنید که هدرهای پین GPIO شما در اولین بار به خوبی به برد Pico متصل هستند.
نحوه اتصال سخت افزار
سیم کشی پیچیده نیست. با این حال، چند مرحله وجود دارد که باید مطمئن شوید که پینهای شما به درستی وصل شدهاند. با در نظر گرفتن این موضوع، بیایید نحوه اتصال قطعات بین Raspberry Pico و breadboard را بررسی کنیم.
- پین GP15 Pico باید به یک سر مقاومت متصل شود.
- یک پین GND روی Pico به ریل منفی روی تخته نان هدایت میشود.
- ترانزیستور را در مقابل سمت منفی کانکتور ترمینال موتور قرار دهید و یک سیم را از سمت منفی ترانزیستور به ریل منفی تخته نان بکشید.
- دوبار بررسی کنید که سیم کشی به درستی با کانکتور ترمینال موتور ردیف شده باشد (این مهم است).
- پین VSYS Pico باید به ریل مثبت روی تخته نان وصل شود. این اطمینان حاصل می کند که 5 ولت برق از طریق ترانزیستور به موتور می رسد (در مقایسه با سایر پین های Pico با تنها 3.3 ولت).
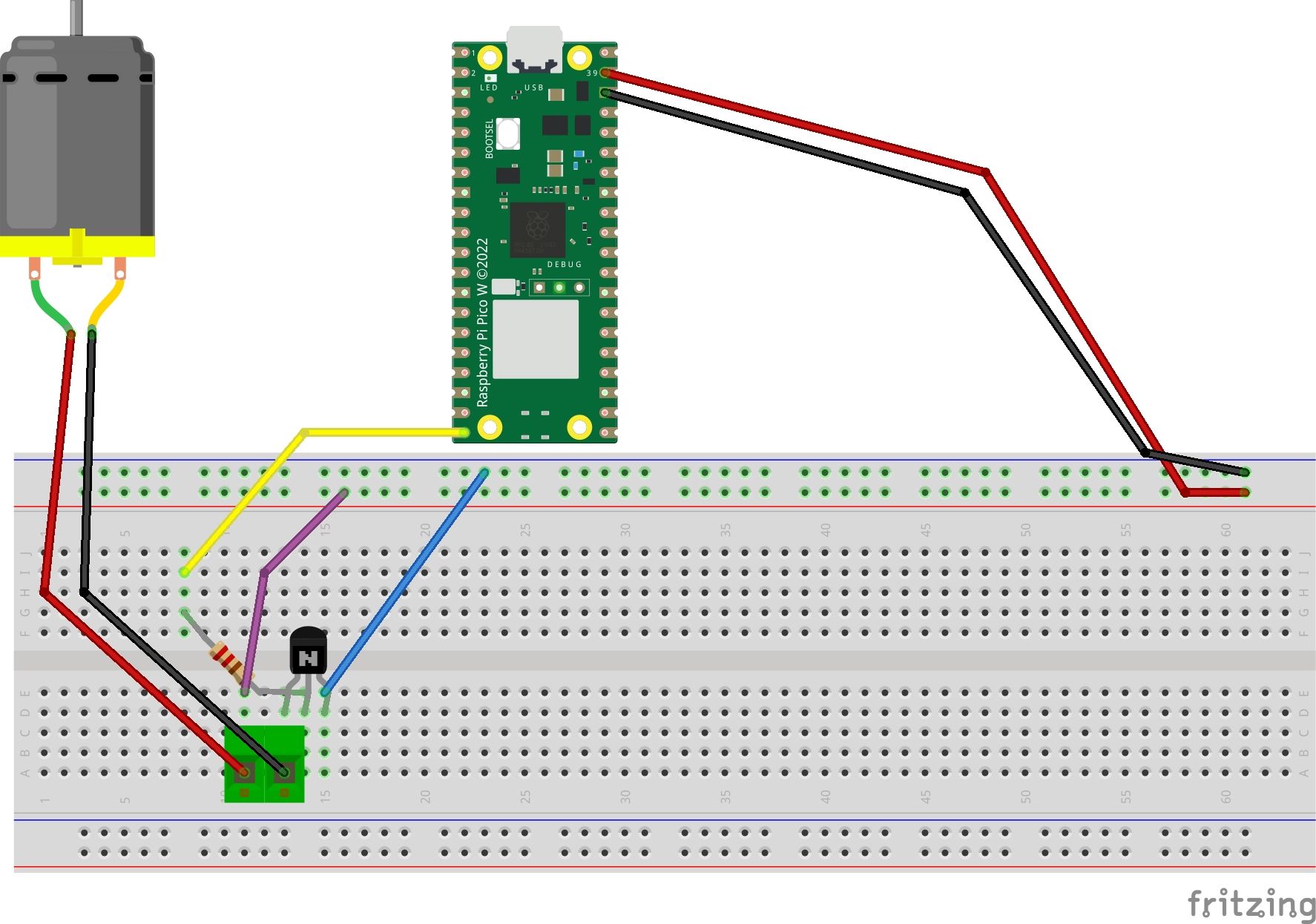
در حالی که در حال بررسی نهایی سیم کشی خود هستید، مطمئن شوید که یک سیم جامپر از ریل مثبت تخته نان به سمت مثبت کانکتور ترمینال موتور وصل شده باشد. علاوه بر این، انتهای دیگر مقاومت باید به پایه وسط ترانزیستور متصل شود. اگر هنوز مشخص نیست، حتما سیم های منفی و مثبت را از کانکتور ترمینال به موتور نیز به درستی وصل کنید.
کاوش در کد
ابتدا باید کد MicroPython را از مخزن MUO GitHub دانلود کنید. به طور خاص، شما می خواهید فایل motor.py را بازیابی کنید. راهنمای ما را برای شروع کار با MicroPython برای جزئیات بیشتر در مورد استفاده از Thonny IDE با Raspberry Pi Pico دنبال کنید.
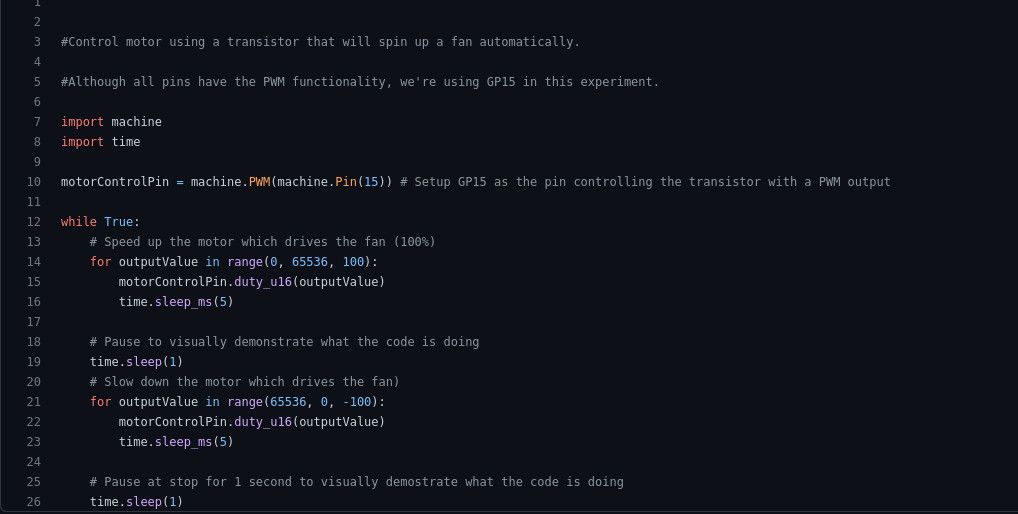
هنگام اجرا، کد به موتور می گوید که فن را بچرخاند، به تدریج سرعت را به حداکثر افزایش می دهد و سپس، پس از مکث کوتاه، سرعت را کاهش می دهد تا دوباره متوقف شود. این کار به طور مداوم تکرار می شود تا زمانی که برنامه را متوقف کنید.
در بالای کد، وارد کردن ماژول های ماشین و زمان به شما امکان می دهد از آنها در برنامه استفاده کنید. ماژول ماشین برای تعیین GP15 به عنوان پایه خروجی موتور، از طریق ترانزیستور، با استفاده از PWM (مدولاسیون عرض پالس) برای تنظیم سرعت آن استفاده می شود. ماژول زمان برای ایجاد تاخیر در عملیات برنامه در مواقعی که به آن نیاز داریم استفاده می شود.
سعی کنید کد را اجرا کنید. فن چند ثانیه طول می کشد تا به سمت بالا بچرخد و شروع به چرخش کند. یک حلقه برای محدود به تدریج مقدار خروجی موتور را از 0 به 65535 (یا بهتر است بگوییم، درست زیر آن) در مراحل 100 افزایش می دهد. یک تاخیر بسیار کوتاه 5 میلی ثانیه ای (با time.sleep_ms(5)) بین هر سرعت داده می شود. در طول حلقه تغییر کند. هنگامی که حلقه کامل شد، قبل از شروع حلقه بعدی، یک تأخیر time.sleep یک ثانیه تنظیم می شود.
در حلقه for دوم، مقدار step روی 100- تنظیم می شود تا به تدریج مقدار خروجی به موتور کاهش یابد. موتور به تدریج از سرعت کامل تا زمانی که کاملاً متوقف شود (در 0) کند می شود. پس از یک ثانیه تاخیر زمان خواب، اولین حلقه for دوباره اجرا می شود، زیرا هر دو در مدت زمانی True هستند: حلقه بی نهایت.
این در واقع تمام چیزی است که در استفاده از یک ترانزیستور و کد برای راه اندازی موتور فن شما دخیل است. به خاطر داشته باشید که این کد برای همیشه حلقه خواهد شد. بنابراین، شما باید دکمه توقف را در Thonny IDE خود فشار دهید تا چرخش موتور و فن متوقف شود.
بعد از آن باد شما را به کجا خواهد برد؟
افزودن عناصر اضافی، مانند نمایشگر 7 قسمتی، به این آزمایش به شما پاداش می دهد که بدانید چگونه توربین های بادی از انرژی جنبشی برای تبدیل باد به نیروی الکتریکی استفاده می کنند.
پروژه دیگری که میتوانید به سمت آن حرکت کنید، راهاندازی یک ایستگاه هواشناسی خانگی است که شرایط فضای باز را نظارت میکند. علاوه بر این، پروژه های جالب دیگری مانند نشانگر باد و سرعت هوا پیدا خواهید کرد که می توانید با Raspberry Pico خود ایجاد کنید.
با استفاده از این دانش بنیادی، به سراغ کدام آزمایش های بعدی خواهید رفت؟ آیا پروژه ای در ذهن دارید؟ اگر برای مدت طولانی تردید کنید، ممکن است در معرض خطر تغییر جهت ذهن (و باد) خود قرار بگیرید.